
Information about the sea ice surface topography and related deformation are crucial for studies of sea ice mass balance, sea ice modeling, and ship navigation through the ice pack. Spaceborne altimeters are able to derive estimates of the sea ice topography, identify leads (fractures in the ice with calm open water, representative of the local sea level), and provide a measure of the sea ice thickness distribution – but, at what resolution? This study aims to assess the capabilities and uncertainties of NASA’s high-resolution spaceborne laser altimeter, Ice, Cloud, and land Elevation Satellite-2 (ICESat-2), by comparing with coincident helicopterborne laser scanner observations achieved during the Multidisciplinary drifting Observatory for the Study of Arctic Climate (MOSAiC) Expedition in the Arctic Ocean. The goal is to investigate how the sea ice surface roughness and topography is represented in different ICESat-2 products, and how sensitive ICESat-2 products are to leads and small cracks in the ice cover. The study was co-lead by Dr. Robert Ricker from NORCE and Dr. Steven Fons at NASA Goddard Space Flight Center and the University of Maryland. It was a collaboration across several institutes working with Arctic sea ice and altimetry, here amongst DTU Space, and the study was recently published in The Cryosphere.
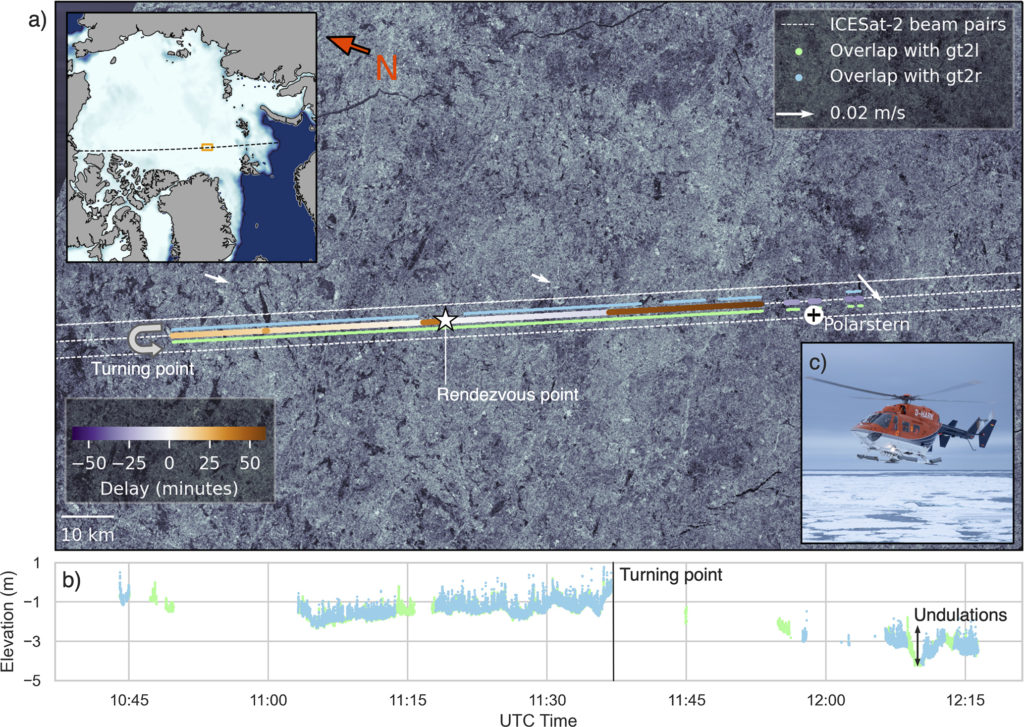
Here, we present a new validation data set for ICESat-2 sea ice measurements that was acquired during the MOSAiC campaign (Nicolaus et al., 2022). The helicopter aboard the drifting research vessel (RV) Polarstern was equipped with an airborne laser scanner (ALS). On 23 March 2020, they followed an ICESat-2 ground track in close vicinity for 130 km. The ALS data was compared with two ICESat-2 surface elevation datasets (computed using different algorithms; the operational NASA product (ATL07) and the high-fidelity product of the University of Maryland, UMD) to investigate the limitations and capabilities of the different algorithms and the spaceborne data. The ALS data was drift-corrected (based on highest correlation) and the comparisons incldes the ALS data at full resolution, the ALS data sampled to ALT07 resolution as well as ATL07 and UMD at their respective resolutions. In this comparison and evaluation of the ICESat-2 observations, the study primarily focused on the ability to detect and estimate the magnitude of sea ice obstacles (assumed to be pressure ridges), the impact of sea ice roughness, and the ability to detect leads. Below we shall summarize some of the main findings of the study.
Lead identifications
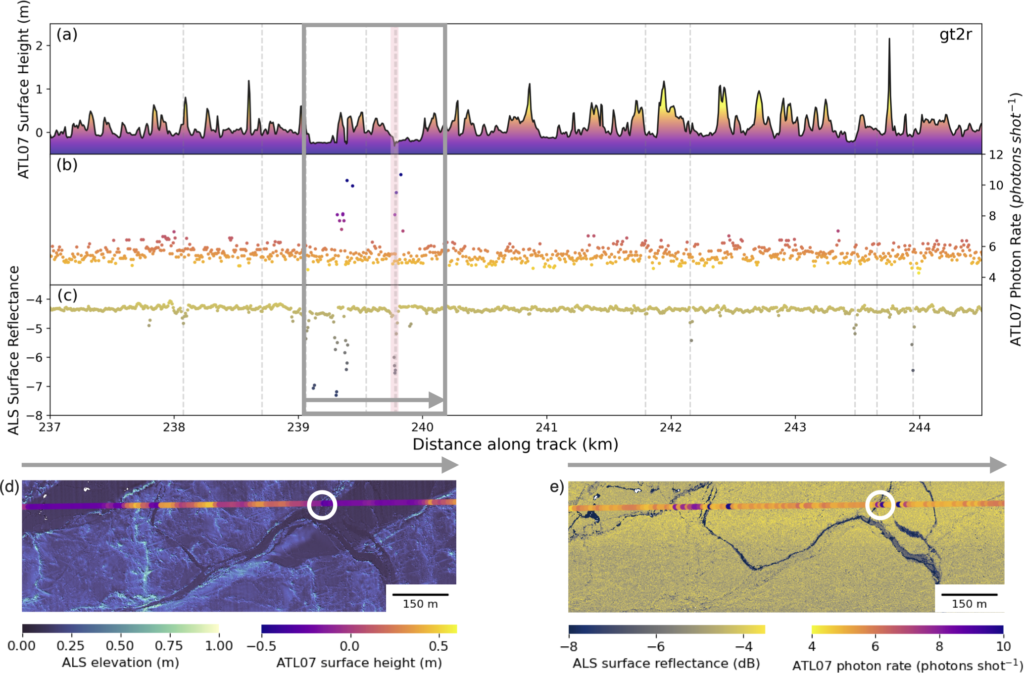
While the segment shown was relatively short (~7 km), only 1 of 10 leads identified in ALS was also identified in ATL07. This contrast between ALS-identified leads and ATL07-identified leads is remarkable. From the ATL07 photon rate and surface height, we observe potential leads that were not classified as such, including those between kilometers 243 and 244. Reasons for this could include the leads observed along this profile mostly being very small (only few meters wide), refrozen cracks in the ice. These cracks are smaller than the ICESat-2 footprint and much smaller than the 150-photon-aggregate segments; therefore, the elevations and photon rates get smoothed by the surrounding ice floes and do not meet the threshold criteria to be considered a lead. Another aspect that adds to the discrepancies comes from the fact that the ALS swath is wider than the ATL07 segment width and that the ALS lead-finding procedure incorporates returns from outside of the overlapping segments. Future analysis of overlapping profiles that flew over more, open, and larger leads would be better to assess the ATL07 parameter lead thresholds and determine the minimum detectable width of leads. Additionally, a future modification to the ATL07 algorithm could be implemented that, for example, relaxes the 150-photon requirement for leads, as fewer signal photons should be needed to get an accurate height retrieval over flat surfaces.
Ridge detections
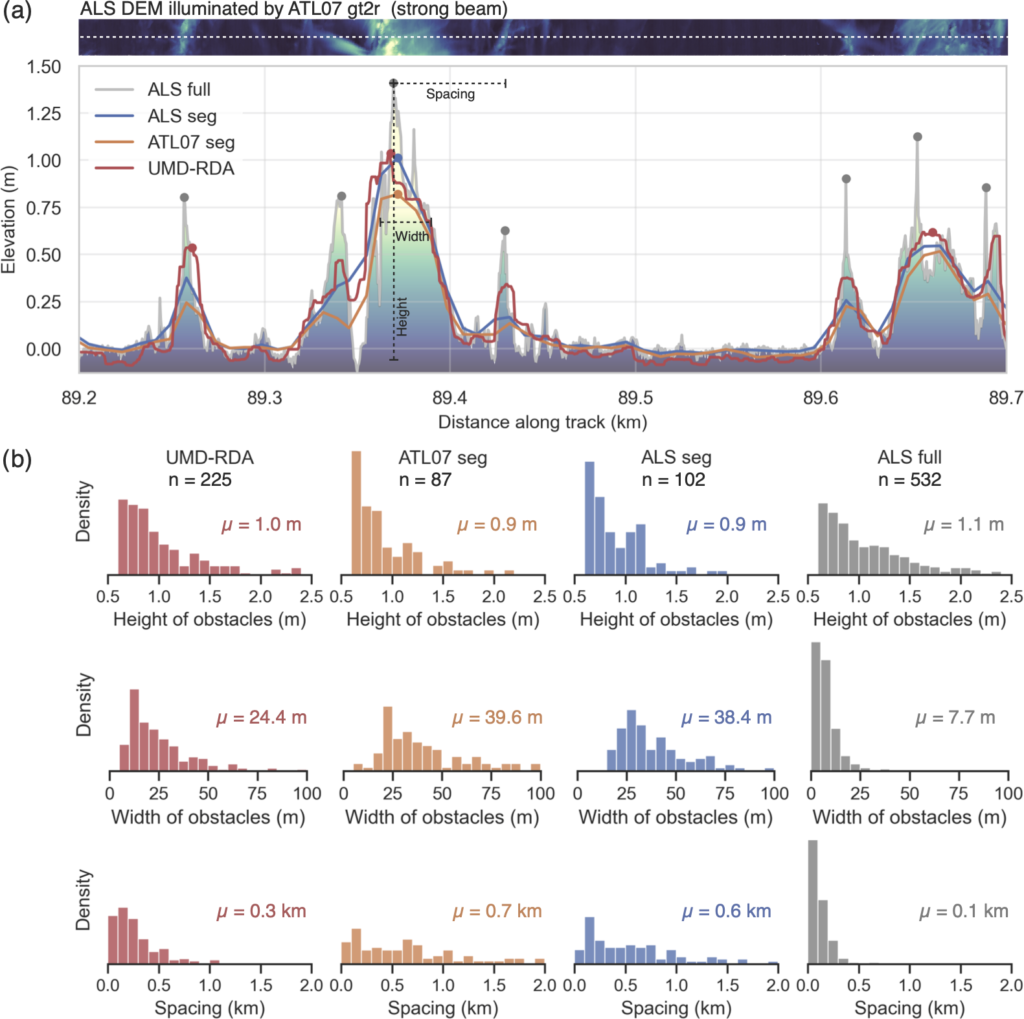
Our results show that ICESat-2 allows for detection and height estimation of individual surface topography features. However, comparison with the high-resolution ALS data set also shows that not all ridges or obstacles will be captured. Ridge detection and sail height estimation depend on the applied algorithm, the dimensions of the ridge, and the data product used. While the height distributions of the detected ridges reveal similar shapes among all products, the width distributions differ substantially. The reason for this is that the width estimates strongly depend on the along-track resolution. The smoothing effect mentioned earlier leads to an increase in width, while narrow ridges with small widths (<5 m) can barely be detected with ATL07. The choice of segment length (ATL07 is of varying segment length using 150-photon aggregates, whereas UMD-RDA aims to provide observations on a per-shot basis) is also a choice made based on the overall objective of each algorithm. While ATL07 aims to provide observations of the average local sea ice elevation, UMD-RDA aims to sample the top of the sea ice pressure ridges. Therefore, UMD-RDA is more likely to provide higher estimates. The fact that neither ATL07 nor UMD-RDA is able to capture the full extent of the surface topography likely shows the limitations of ICESat-2 for specific obstacle detection. With that being said, considering that ICESat-2 is a spaceborne platform observing meter-scale features from a 500 km orbit, these results are remarkable if compared to previous satellite altimeter missions.
Weak beams vs strong beams
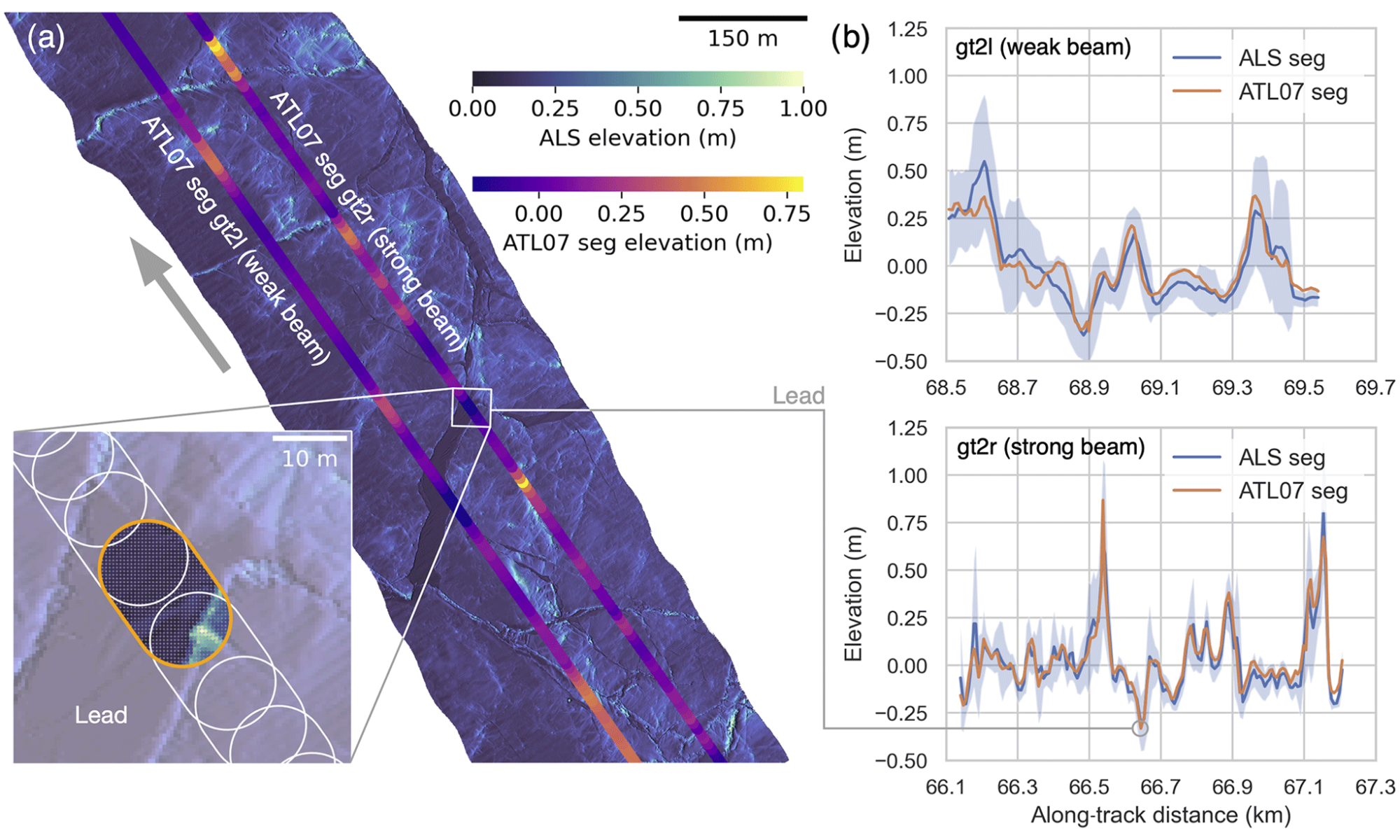
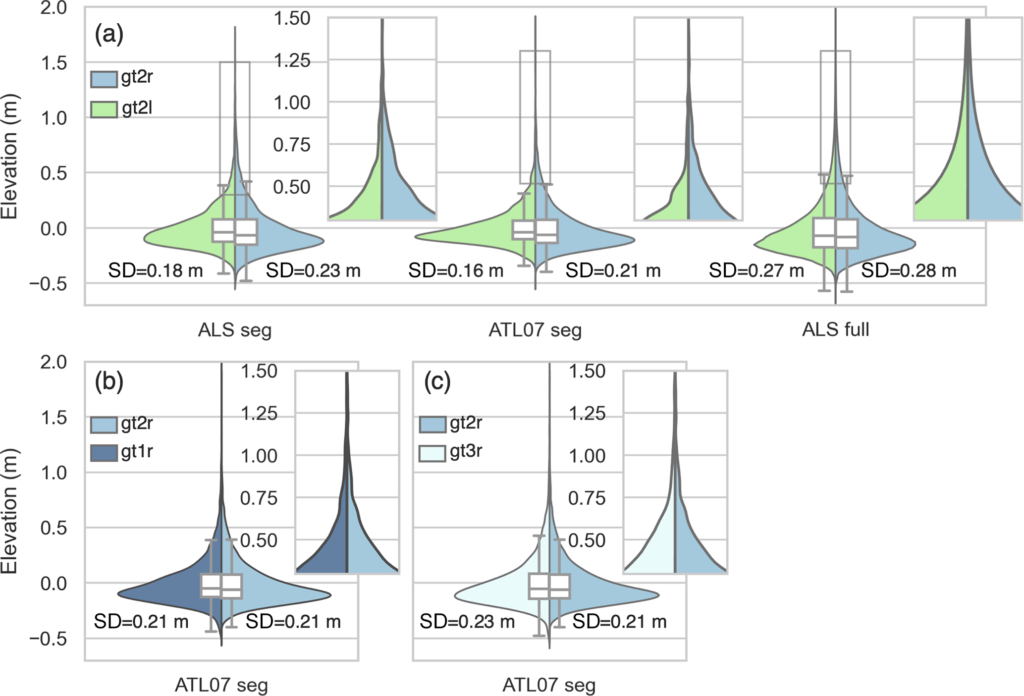
The differences between the weak and strong beams are a result of the surface reflectance and laser power, and with the laser power of the strong beams being about 4 times greater than that of the weak beams, the segments of the weak beam are about 3.5 times longer in order to collect the 150 signal photons. This results in smoother elevation profile for the weak beam, whereas the strong beam reveals more details of the surface topography. However, when comparing the aforementioned elevation profiles to segment-averaged ALS elevations, we find that the performance of the weak beam is comparable to the strong beam. Thus, weak-beam elevations are suitable for large-scale studies of the sea ice freeboard and thickness, when small-scale topography is less important.
Full study:
Ricker, R., Fons, S., Jutila, A., Hutter, N., Duncan, K., Farrell, S. L., Kurtz, N. T., and Fredensborg Hansen, R. M.: Linking scales of sea ice surface topography: evaluation of ICESat-2 measurements with coincident helicopter laser scanning during MOSAiC, The Cryosphere, 17, 1411–1429, https://doi.org/10.5194/tc-17-1411-2023, 2023.